UnifoLM-WMA-0: A World-Model-Action (WMA) Framework under UnifoLM Family
Project Page | Models | Dataset
🌎English | 🇨🇳中文
🦾 Real Robot Deployment
 |
 |
|---|---|
 |
 |
Note: the top-right window shows the world model’s prediction of future action videos.
🔥 News
- Sep 15, 2025: 🚀 We released the training and inference code along with the model weights of UnifoLM-WMA-0.
📑 Opensource Plan
- Training
- Inference
- Checkpoints
- Deployment
⚙️ Installation
conda create -n unifolm-wma python==3.10.18
conda activate unifolm-wma
conda install pinocchio=3.2.0 -c conda-forge -y
conda install ffmpeg=7.1.1 -c conda-forge
git clone --recurse-submodules https://github.com/unitreerobotics/unifolm-world-model-action.git
# If you already downloaded the repo:
cd unifolm-world-model-action
git submodule update --init --recursive
pip install -e .
cd external/dlimp
pip install -e .
🧰 Model Checkpoints
| Model | Description | Link |
|---|---|---|
\text{UnifoLM-WMA-0}_{Base} |
Fintuned on Open-X dataset. | HuggingFace |
\text{UnifoLM-WMA-0}_{Dual} |
Fintuned on five Unitree opensource dataset in both decision-making and simulation modes. | HuggingFace |
🛢️ Dataset
In our experiments, we consider the following three opensource dataset:
| Dataset | Robot | Link |
|---|---|---|
| Z1_StackBox | Unitree Z1 | Huggingface |
| Z1_DualArm_StackBox | Unitree Z1 | Huggingface |
| Z1_DualArm_StackBox_V2 | Unitree Z1 | Huggingface |
| Z1_DualArm_Cleanup_Pencils | Unitree Z1 | Huggingface |
| G1_Pack_Camera | Unitree G1 | Huggingface |
To train on your own dataset, first to have the data following the Huggingface LeRobot V2.1 dataset format. Assume the dataset’s source directory structure is as follows:
source_dir/
├── dataset1_name
├── dataset2_name
├── dataset3_name
└── ...
Then, convert a dataset to the required format using the command below:
cd prepare_data
python prepare_training_data.py \
--source_dir /path/to/your/source_dir \
--target_dir /path/to/save/the/converted/data \
--dataset_name "dataset1_name" \
--robot_name "a tag of the robot in the dataset" # e.g, Unitree Z1 Robot Arm or Unitree G1 Robot with Gripper.
The resulting data structure (Note: model training only supports input from the main-view camera. If the dataset includes multiple views, remove the corresponding values from the data_dir column in the CSV file.
target_dir/
├── videos
│ ├──dataset1_name
│ │ ├──camera_view_dir
│ │ ├── 0.mp4
│ │ ├── 1.mp4
│ │ └── ...
│ └── ...
├── transitions
│ ├── dataset1_name
│ ├── meta_data
│ ├── 0.h5
│ ├── 1.h5
│ └── ...
└── dataset1_name.csv
🚴♂️ Training
A. Our training strategy is outlined as follows:
- Step 1: Fine-tune a video generation model as the world model using the Open-X dataset;
- Step 2: Post-train
\text{UnifoLM-WMA}in decision-making mode on the downstream task dataset;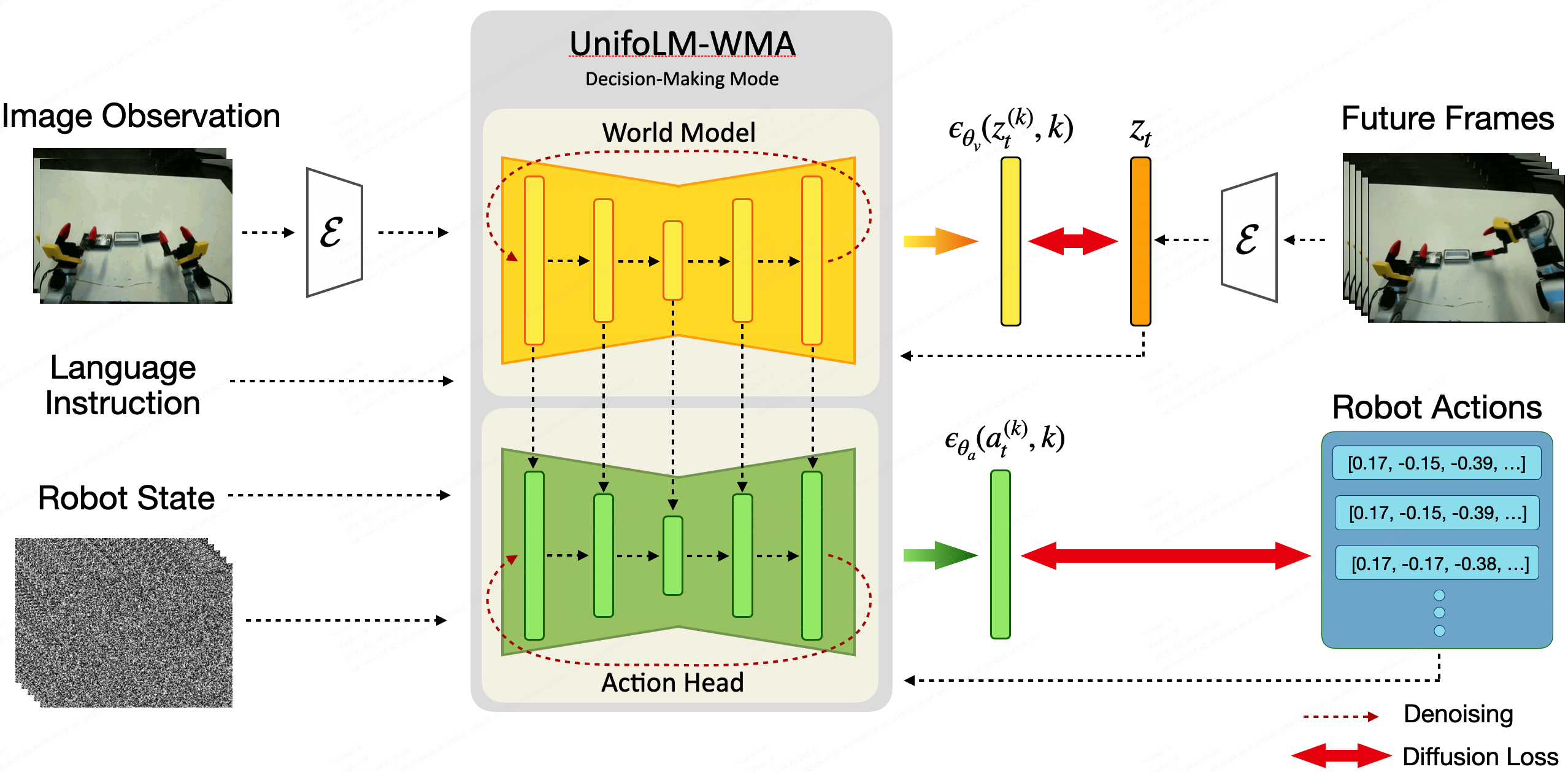
- Step 3: Post-train
\text{UnifoLM-WMA}in simulation mode on the downstream task dataset.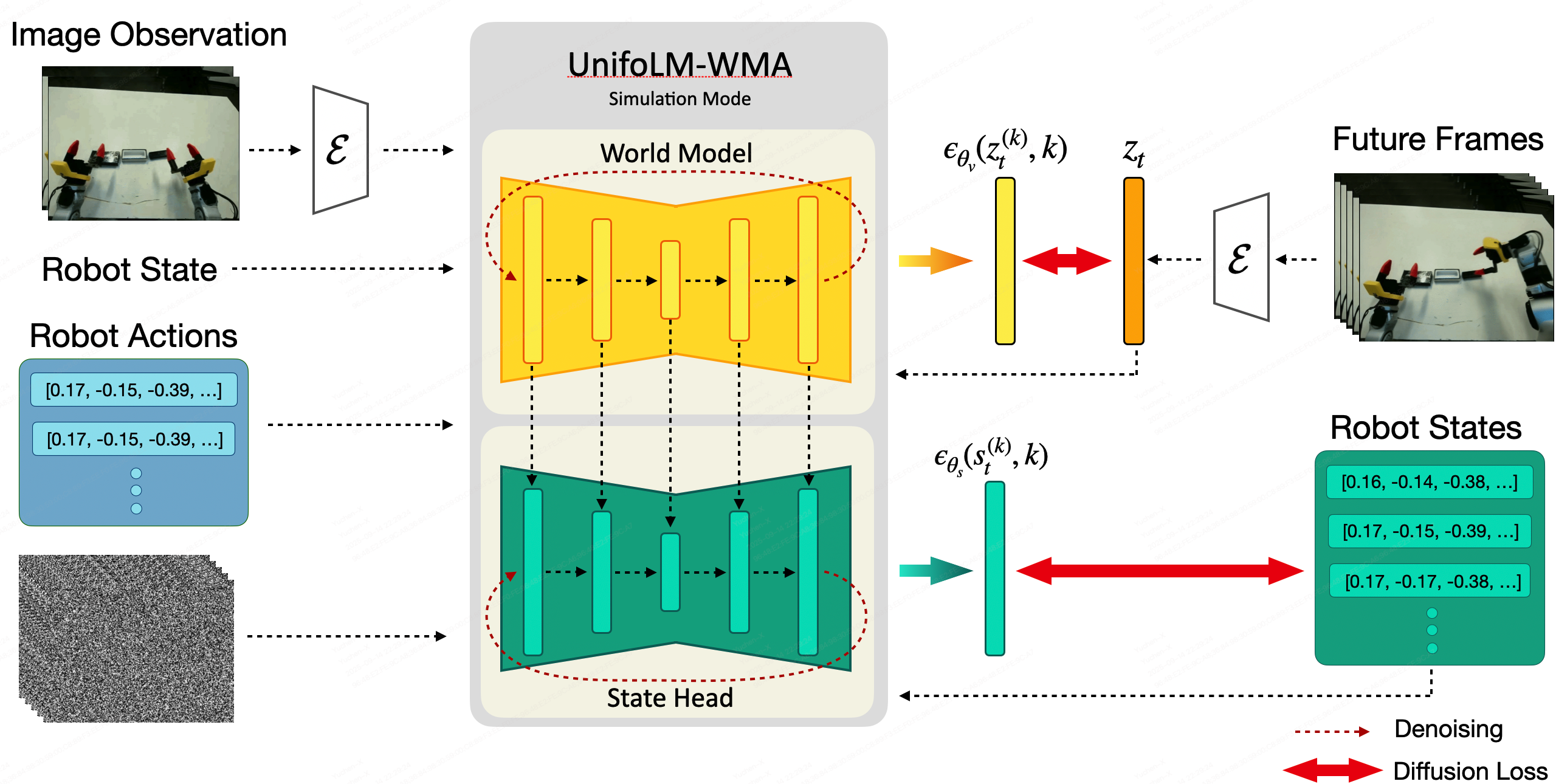


Note: If you only require \text{UnifoLM-WMA} to operate in a single mode, you may skip the corresponding step.
B. To conduct training on a single or multiple datasets, please follow the steps below:
- Step 1: The maximum DoF is assumed to be 16, if you have more than 16 DoF, update
agent_state_dimandagent_action_dimin configs/train/config.yaml ; - Step 2: Set up the input shapes for each modality in configs/train/meta.json;
- Step 3: Configure the training parameters in configs/train/config.yaml. For the
pretrained_checkpoint, we recommend using the checkpoint "\text{UnifoLM-WMA-0}_{Base}" fine-tuned on the Open-X dataset;model: pretrained_checkpoint: /path/to/pretrained/checkpoint; ... dicision_making_only: True # Train the world model only in decision-making mode. If False, jointly train it in both decision-making and simulation modes. ... data: ... train: ... data_dir: /path/to/training/dataset/directory dataset_and_weights: # list the name of each dataset below and make sure the summation of weights is 1.0 dataset1_name: 0.2 dataset2_name: 0.2 dataset3_name: 0.2 dataset4_name: 0.2 dataset5_name: 0.2 - Step 4: Setup
experiment_name,save_rootvariables in scripts/train.sh; - Step 5: Lanuch the training with the command:
bash scripts/train.sh
🌏 Inference under the Interactive Simulation Mode
To run the world model in an interactive simulation mode, follow these steps:
- Step 1: (Skip this step if you just would like to test using the examples we provided) Prepare your own prompt following the format used in the examples/world_model_interaction_prompts:
world_model_interaction_prompts/ ├── images │ ├── dataset1_name │ │ ├── 0.png # Image prompt │ │ └── ... │ └── ... ├── transitions │ ├── dataset1_name │ │ ├── meta_data # Used for normalization │ │ ├── 0.h # Robot state and action data; in interaction mode, │ │ │ # only used to retrieve the robot state corresponding │ │ │ # to the image prompt │ │ └── ... │ └── ... ├── dataset1_name.csv # File for loading image prompts, text instruction and corresponding robot states └── ... - Step 2: Specify the correct paths for
pretrained_checkpoint(e.g,\text{UnifoLM-WMA-0}_{Dual}) anddata_dirin configs/inference/world_model_interaction.yaml - Step 3: Set the paths for
checkpoint,res_dirandprompt_dirin scripts/run_world_model_interaction.sh, and specify all the dataset's name indatasets=(...). Then, lanuch the inference with the command:bash scripts/run_world_model_interaction.sh
📝 Codebase Architecture
Here's a high-level overview of the project's code structure and core components:
unitree-world-model/
├── assets # Media assets such as GIFs, images, and demo videos
├── configs # Configuration files for training and inference
│ ├── inference
│ └── train
├── examples # Example inputs and prompts for running inference
├── external # External packages
├── prepare_data # Scripts for dataset preprocessing and format conversion
├── scripts # Main scripts for training, evaluation, and deployment
├── src
│ ├──unitree_worldmodel # Core Python package for the Unitree world model
│ │ ├── data # Dataset loading, transformations, and dataloaders
│ │ ├── models # Model architectures and backbone definitions
│ │ ├── modules # Custom model modules and components
│ │ └── utils # Utility functions and common helpers
🙏 Acknowledgement
Lots of code are inherited from DynamiCrafter, Diffusion Policy, ACT and HPT.
📝 Citation
@misc{unifolm-wma-0,
author = {Unitree},
title = {UnifoLM-WMA-0: A World-Model-Action (WMA) Framework under UnifoLM Family},
year = {2025},
}